Friction-Drive Power-Assist for Manual Wheelchairs
2-minute full case study (the scroll-through / deep dive)
Context & users
Many manual wheelchair users could benefit from intermittent power assist, but most kits are expensive, heavy, or require permanent frame changes. Goal: a low-cost, removable, motorized friction-assist that keeps manual control intuitive.
Requirements / constraints
No frame modification; compact add-on
Predictable, safe behavior; safety interlock (e-stop), clear states, no creep
Performance: works on flat and mild inclines; roadmap for weather/debris tolerance
Build envelope: complete within an eight-week semester and a limited budget
Solution architecture
Drive: motorized friction roller on the rear tire with 6.25:1 gearbox and NEO brushless motor (sized from load cases)
Structure: modular, serviceable brackets (printed + machined) sized for stiffness and repeatability
Engagement: linear-rail mechanism with momentary push control to apply/remove assist consistently
Electronics: enclosed controller and wiring harness designed for field access and quick swaps
Engineering highlights
Sizing & calcs: torque/speed trade-offs (target ≈ 137 W, 28 N·m stall); contact pressure for traction without tire wear
FEA: bracket stiffness and housing stress; geometry tuned to avoid slip/chatter under load
Controls: simple state diagram (idle → assist → e-stop); current limit and safe default behaviors
Build & test
Bench: printed fixtures for rapid iteration; roller load, current draw, and basic thermal rise tests
Field: measured speed on flat/mild inclines; logged current and temperatures; tuned roller compound and preload
Tuning goal: preserve fine manual control while providing noticeable powered assist
Results
Assist: walking-speed assist on flat; usable assist on mild inclines
Handover: smooth handover between powered and manual modes
Safety: integrated e-stop; no failures during multi-session, multi-km tests
What I’d ship next
Weather sealing and debris guards on the roller/mechanism
Manufacturable enclosure and harness; standardized hardware
Endurance and wear testing; long-duration thermal and duty-cycle characterization
Control refinements (engagement feel, current ramp, battery management)
Gallery
-

Friction-drive assist prototype; bolt-on module—no frame modifications.
-
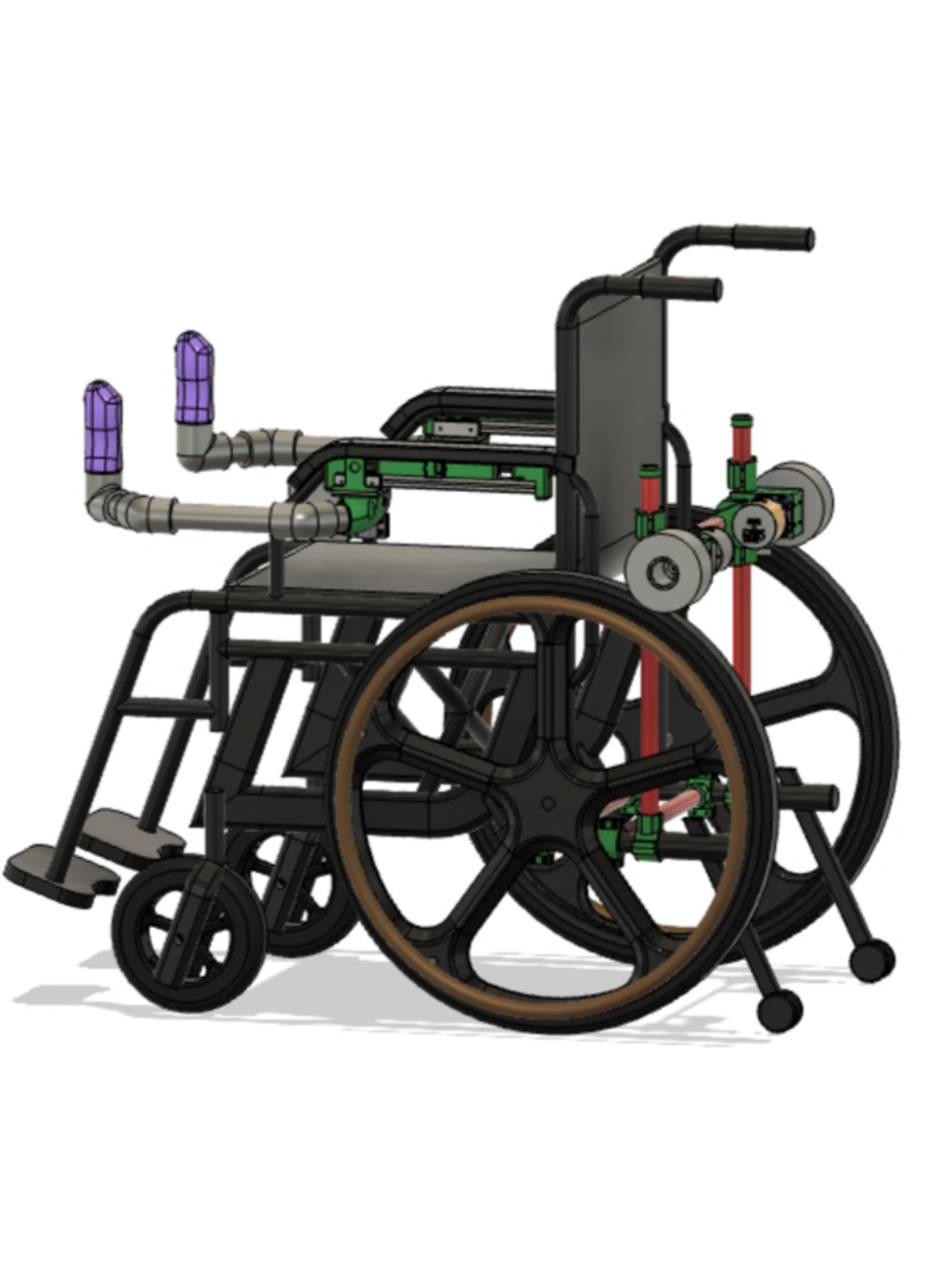
System layout: twin rollers drive rear tire; handle inputs route to compact controller.
-

Drive module: low-profile roller, printed brackets, and quick-service mounts.
-

Power path used for sizing: motor → gearbox → roller → wheel (sanitized).
-

Serviceable electronics enclosure and harnessing; quick-disconnects for maintenance.
-
-
-
-